Battery Management System and Power Delivery Board

Project Information
- Category: Robotics
- Organization: UBC Subbots
- Project date: 01/09/23 - Ongoing
- Project URL: www.subbots.ca
Project Overview
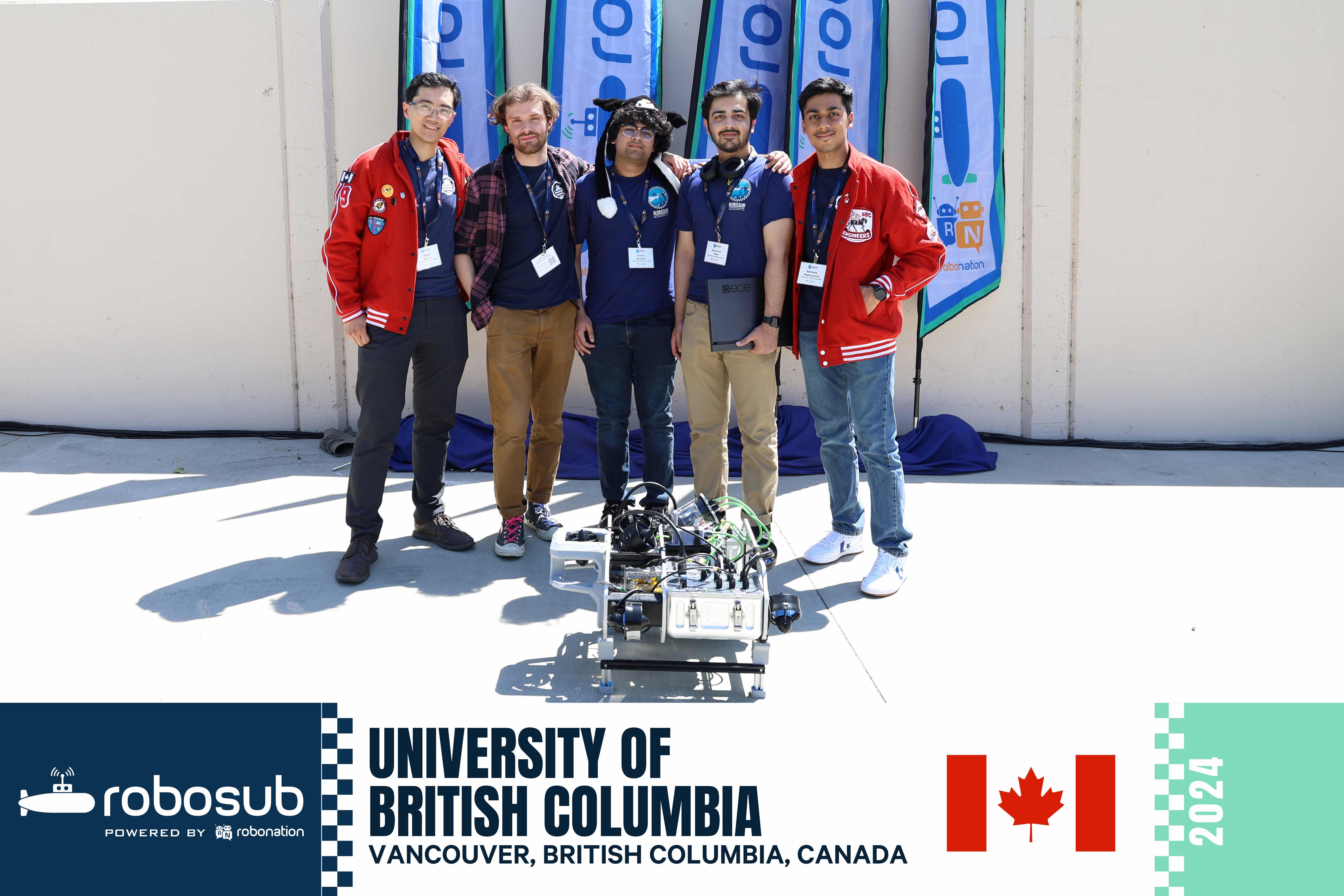
UBC Subbots is a multidisciplinary engineering design team focused on developing a fully autonomous underwater vehicle (AUV) for international competition at RoboSub. The project integrates embedded firmware, robotics middleware, power electronics, perception, and systems engineering to enable reliable autonomous operation in a harsh, safety-critical underwater environment.
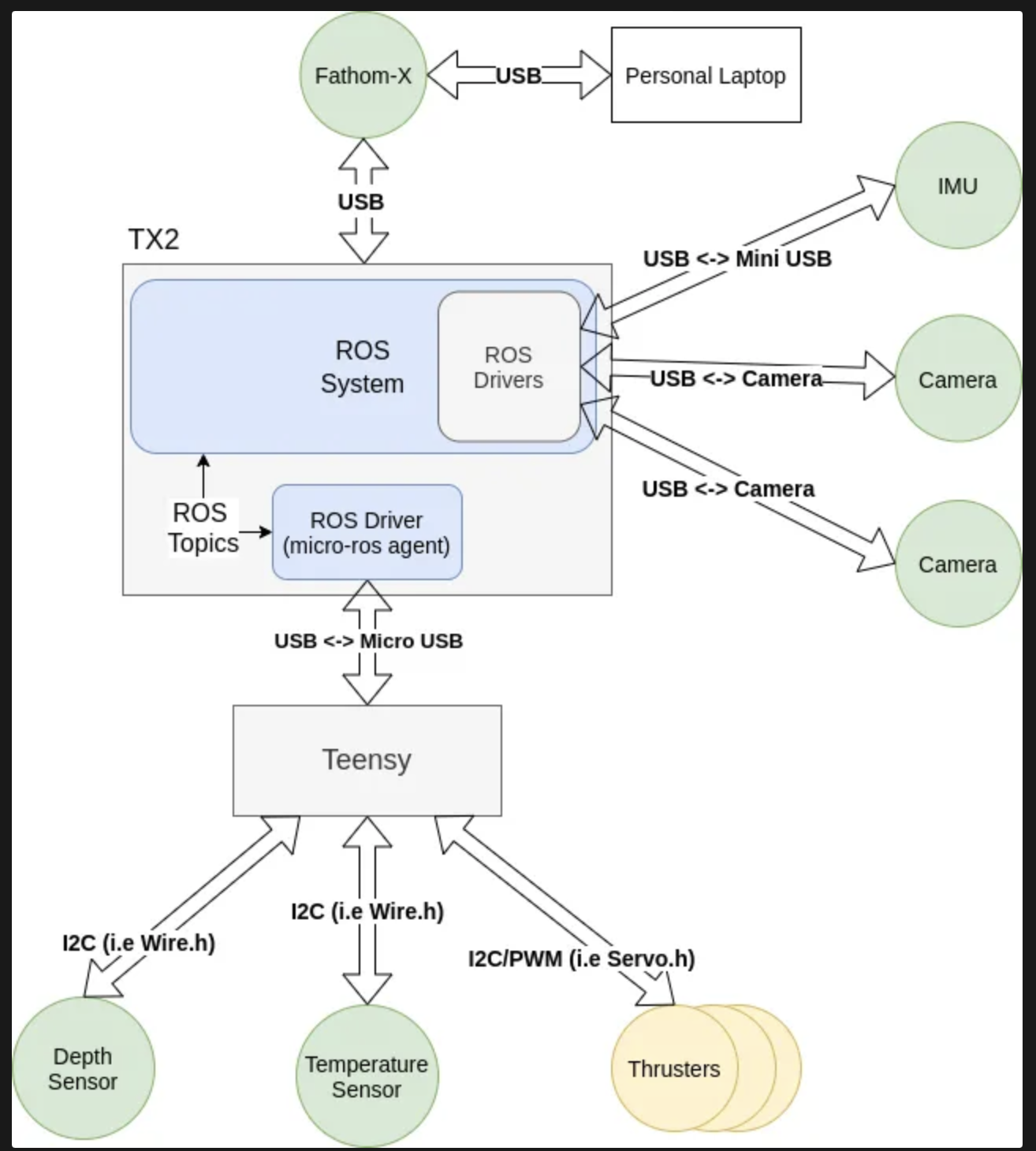
Embedded Systems & Thruster Control
- Worked on Teensy-based embedded firmware responsible for thruster control
- Supported both:
- Manual control modes
- Autonomous control modes driven by higher-level software
- Implemented and tested thruster presets to support different operating configurations
- Integrated firmware interfaces to receive control commands and status data from an NVIDIA TX2, ensuring reliable communication between embedded controllers and onboard compute
- Assisted with system-level testing to validate control behavior under real mission conditions
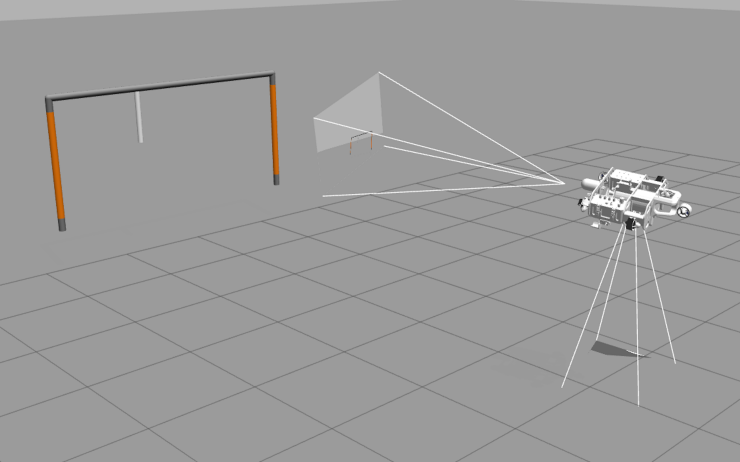
Robotics Simulation & Model Integration (Triton → Steelhead)
- Worked on Gazebo-based simulation development and vehicle model integration during the migration from Triton to Steelhead
- Assisted with updating and validating vehicle models to reflect changes in physical hardware and configuration
- Helped ensure simulation parity with the real vehicle by verifying dynamics, coordinate frames, and sensor placement
- Supported simulation-based testing to reduce on-vehicle debugging during development and competition preparation
Robotics Systems Integration
- Worked within a multi-layer robotics architecture spanning embedded controllers, onboard compute, and ROS-based autonomy software
- Assisted with defining and validating interfaces between low-level firmware and higher-level control software
- Contributed to overall system reliability by supporting testing, integration, and debugging across subsystems
Competition Results & Impact
- Contributed to UBC Subbots achieving semi-finalist placement at RoboSub in both 2023 and 2024
- Helped support stable thruster control across manual and autonomous operation modes
- Played a role in maintaining system reliability and operational readiness during back-to-back competition cycles